















The Underwater Photography Guide today released the results of the world’s largest underwater photo contest. The lifting of travel restrictions led to an unprecedented calibre of photos, including the best in show image featuring another teachable moment from an octopus. The photo, taken by Kat Zhou in Palm Beach, Florida, depicts the bittersweet final days between a mother octopus and her young before her death.
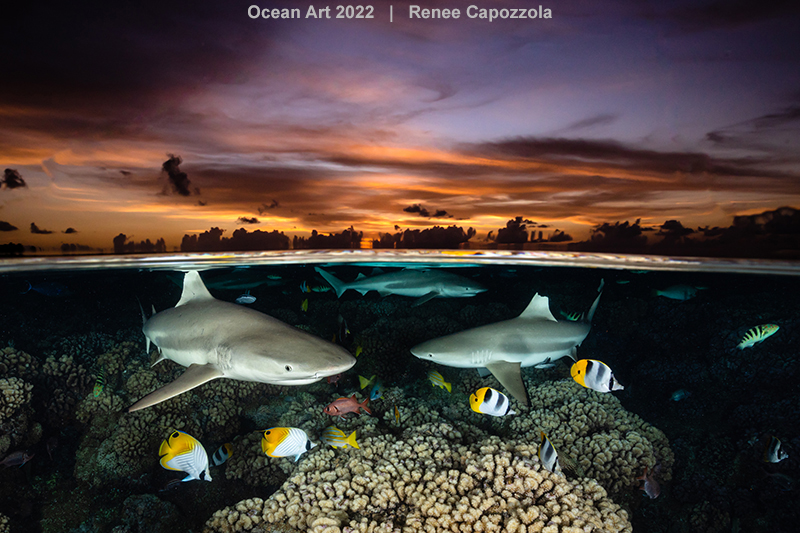
This over-under image was shot on the remote atoll of Fakarava in French Polynesia, which is a UNESCO Biosphere Reserve. Due to strong legal protections, the marine ecosystem here is full of life, and you can view many sharks in their natural habitat.
The contest awarded the largest selection of prizes ever in an underwater photo competition, totalling over $100,000.

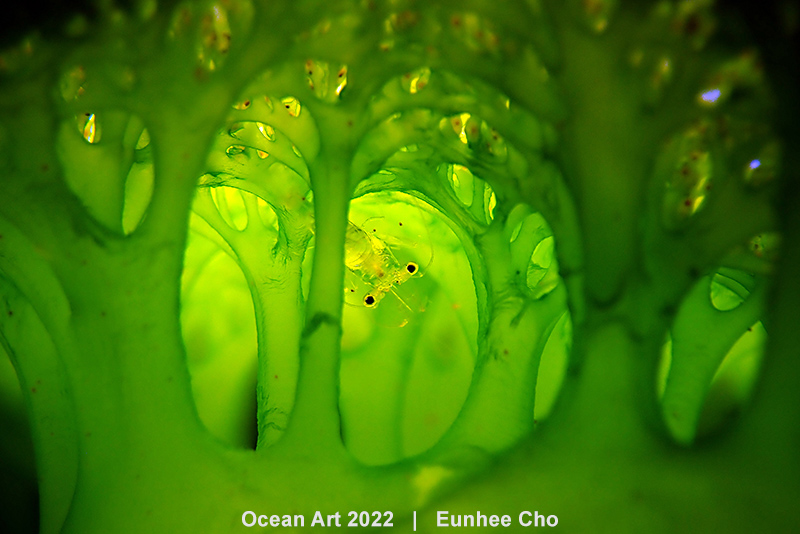
Catching coral spawning is tricky business as it usually happens only once a year in a certain month of the year, on a specific night of the month, and at a certain hour of the night for a very short time window of only a few minutes. This Image is part of an ongoing scientific-documentary project documenting the nightlife and unique reproductive phenomena of corals and other inhabitants of the coral reef in the Red Sea. The photographer spent 300 nights underwater in the last few years during the major reproduction season of corals and other reef-associated animals snorkelling and freediving for hours every night to document the nocturnal behaviour and build a calendar of the reproduction of corals and other coral-reef dwellers.
This year’s competition debuted a new Mobile Phone category, with inspiring images captured by a tool that almost every ocean lover has in their pocket. The category aimed to inspiring new underwater photographers and explorers to tell their own stories.

Shot in Cala Liberotto, Sardinia using an iPhone7 and a Haoguduo Phone Case
Other winners were extraordinary extra-terrestrial blackwater scenes of pelagic creatures, images that brought hope and solutions for ocean conservation, imaginative photographic techniques and inspiring animal portraits. With 14 different categories, the competition ensured a competitive contest for all levels and disciplines of underwater photography. After evaluating thousands of entries from 96 countries, the judges selected the final set of images as the Ocean Art winners.

Taken in Tulamben, Bali. The photographer post processed this stunning image, mirroring and sharpening the rhinophores.
Ocean Art 2022 judges included prestigious underwater photographers Tony Wu, Mark Strickland, and Marty Snyderman.

Prizes for Ocean Art 2022 are provided by some of the world’s top scuba diving resorts, liveaboard dive boats and underwater photo gear manufacturers. Sponsors include M.Y. Oceanic, S.M.Y. Ondina, Eco Divers, Coralia, Dive Damai, Colombia Dive Adventures, Meridian Adventure, Avalon Outdoor, Carpe Diem Cruises, Papua Diving Resorts and Sea & Sea.

Shot in Cenote Dos Pisos, Riviera Maya, Yucatan, Mexico
As the world resumes activities once considered normal, Ocean Art 2022 is a testament to the
promise of novel photographic talent and innovation ahead. The competition was overseen by Nirupam Nigam, Editor-in-Chief of the Underwater Photography Guide and a partner in Bluewater Photo and Bluewater Travel. Nirupam commented, “The winners of Ocean Art 2022 surprised me. I expected an “instagramable” moment to steal the show. Instead, each image is that of photographic excellence or poetic reflection of the natural world around us. These images will be seared in my mind of years to come.”
Shot in Dauin, Negros Oriental, Philippines
You can see all the winning photos here.

Shot in Victoria, Australia
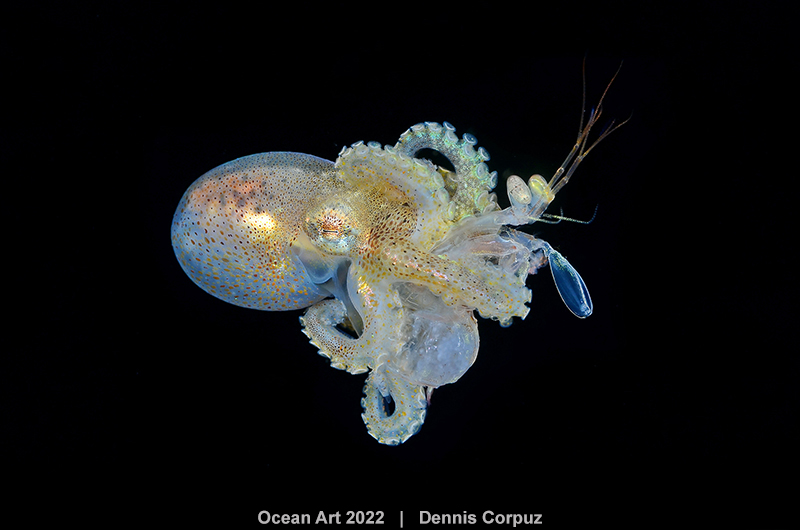
A hungry paralarvae octopus ambushes a larval mantis shrimp in Janao Bay, Anilao, Philippines


